
1. Stereopsis
Stereopsis refers to our ability to appreciate depth, that is the ability to distinguish the relative distance of objects with an apparent physical displacement between the objects. It is possible to appreciate the relative location of objects using one eye (monocular cues). However, it is the lateral displacement of the eyes that provides two slightly different views of the same object (disparate images) and allow acute stereoscopic depth discrimination.
2. Monocular Cues
Several strong monocular cues allow relative distance and depth to be judged. These monocular cues include:
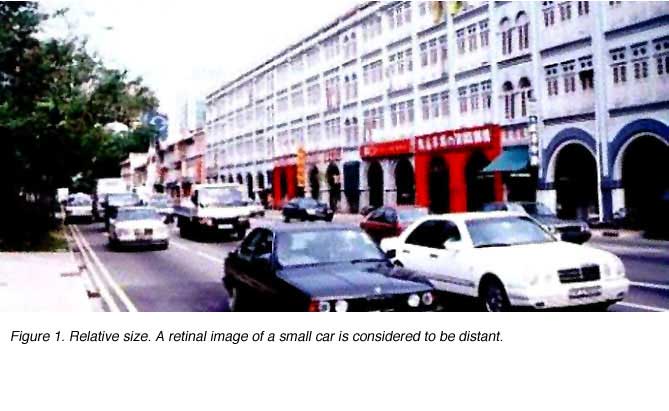
- Relative size
- Interposition
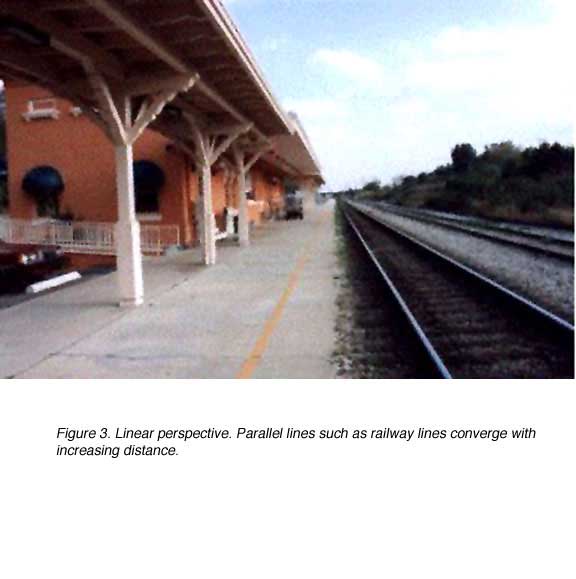
- Linear perspective
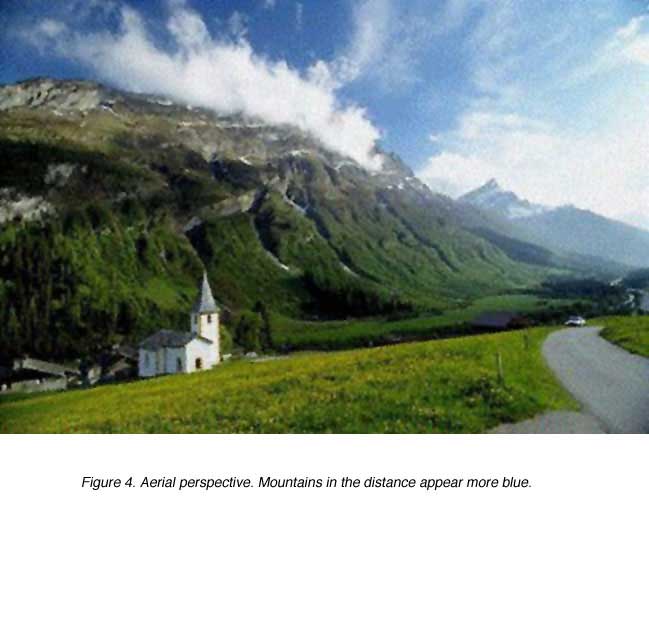
- Aerial perspective
- Light and shade
- Monocular movement parallax
Relative Size: Retinal image size allow us to judge distance based on our past and present experience and familiarity with similar objects. As the car drives away, the retinal image becomes smaller and smaller. We interpret this as the car getting further and further away. This is referred to as size constancy. A retinal image of a small car is also interpreted as a distant car (figure 1).
Interposition: Interposition cues occur when there is overlapping of objects. The overlapped object is considered further away (figure 2).
 Linear Perspective: When objects of known distance subtend a smaller and smaller angle, it is interpreted as being further away. Parallel lines converge with increasing distance such as roads, railway lines, electric wires, etc (figure 3).
Linear Perspective: When objects of known distance subtend a smaller and smaller angle, it is interpreted as being further away. Parallel lines converge with increasing distance such as roads, railway lines, electric wires, etc (figure 3).
 Aerial Perspective: Relative colour of objects give us some clues to their distance. Due to the scattering of blue light in the atmosphere, creating “wall” of blue light, distance objects appear more blue (figure 4). Thus distant mountains appear blue. Contrast of objects also provide clues to their distance. When the scattering of light blurs the outlines of objects, the object is perceived as distant. Mountains are perceived to be closer when the atmosphere is clear.
Aerial Perspective: Relative colour of objects give us some clues to their distance. Due to the scattering of blue light in the atmosphere, creating “wall” of blue light, distance objects appear more blue (figure 4). Thus distant mountains appear blue. Contrast of objects also provide clues to their distance. When the scattering of light blurs the outlines of objects, the object is perceived as distant. Mountains are perceived to be closer when the atmosphere is clear.
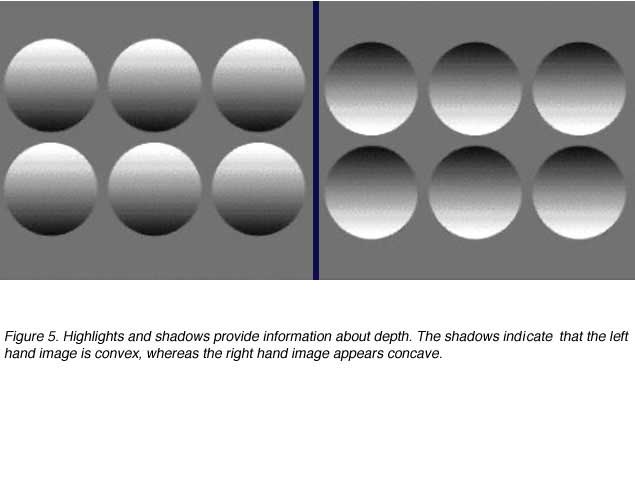
 Light And Shade: Highlights and shadows can provide information about an object’s dimensions and depth (figure 5). Because our visual system assumes the light comes from above, a totally different perception is obtained if the image is viewed upside down.
Light And Shade: Highlights and shadows can provide information about an object’s dimensions and depth (figure 5). Because our visual system assumes the light comes from above, a totally different perception is obtained if the image is viewed upside down.
 Monocular Movement Parallax: When our heads move from side to side, objects at different distances move at a different relative velocity. Closer objects move “against” the direction of head movement and farther objects move “with” the direction of head movement.
Monocular Movement Parallax: When our heads move from side to side, objects at different distances move at a different relative velocity. Closer objects move “against” the direction of head movement and farther objects move “with” the direction of head movement.
3. Binocular Cues
Stereopsis is an important binocular cue to depth perception. Stereopsis cannot occur monocularly and is due to binocular retinal disparity within Panum’s fusional space. Stereopsis is the perception of depth produced by binocular retinal disparity. Therefore, two objects stimulates disparate (non-corresponding) retinal points within Panum’s fusional area.
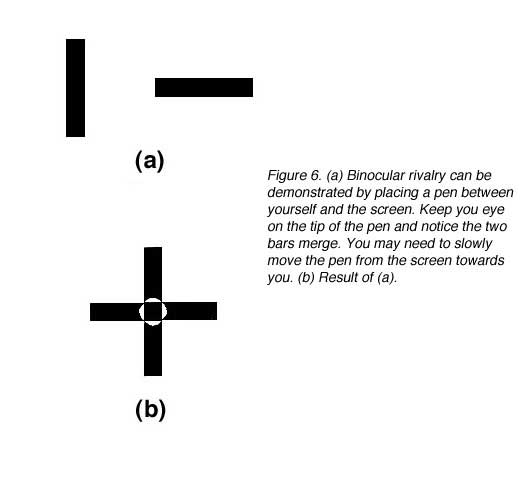
Fusion describes the neural process that brings the retinal images in the two eyes to form one single image. Fusion occurs to allow single binocular vision. Fusion takes place when the objects are the same. When the objects are different, suppression, superimposition or binocular (“retinal”) rivalry may occurs. Suppression occurs to eliminate one image to prevent confusion. Superimposition results in one image presented on top of the other image. Binocular rivalry describes alternating suppression of the two eyes resulting in alternating perception of the two images. This usually occurs when lines are presented to the two eyes differ in orientation, length or thickness. An example of binocular rivalry occurs when one eye is presented with a horizontal line and the other eye is presented with a vertical line. Binocular rivalry occurs at the intersection of the lines and some suppression also exists (figure 6)
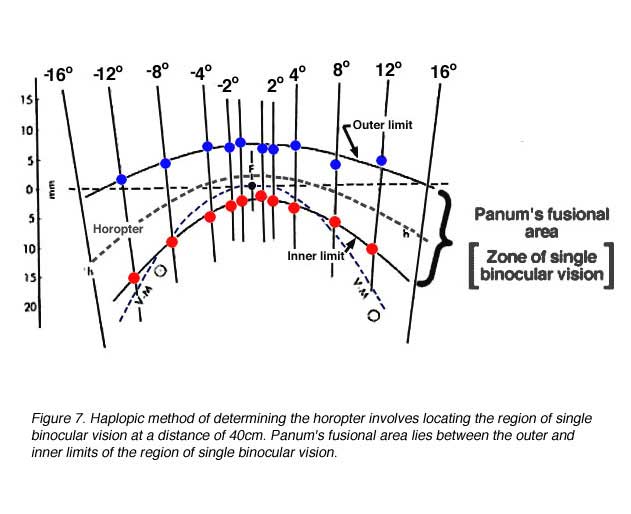
 Panum’s fusional area is the region of binocular single vision. Outside Panum’s fusional area, physiological diplopia occurs. Using the haplopic method of determining the horopter, Panum’s area can be determined (figure 7).
Panum’s fusional area is the region of binocular single vision. Outside Panum’s fusional area, physiological diplopia occurs. Using the haplopic method of determining the horopter, Panum’s area can be determined (figure 7).
 Retinal disparity: Retinal disparate points are retinal points that give rise to different principal visual direction and diplopia. However, retinal disparity within Panum’s fusional area (zone of single binocular vision) can be fused resulting in single vision. Retinal disparity is essential for stereoscopic depth perception as stereoscopic depth perception results from fusion of slightly dissimilar images. Due to the lateral displacement of our eyes, slightly dissimilar retinal images result from the different perception of the same object from each eye.
Retinal disparity: Retinal disparate points are retinal points that give rise to different principal visual direction and diplopia. However, retinal disparity within Panum’s fusional area (zone of single binocular vision) can be fused resulting in single vision. Retinal disparity is essential for stereoscopic depth perception as stereoscopic depth perception results from fusion of slightly dissimilar images. Due to the lateral displacement of our eyes, slightly dissimilar retinal images result from the different perception of the same object from each eye.
4. Clinical Tests used to measure Stereopsis
There are two groups of clinical tests used to measure stereopsis. These are the contour stereotests and the random-dot stereotest. Random-dot stereograms were first used by Julesz (1960) to eliminate monocular cues. As there are no contours, depth perception (stereopsis) can only be appreciated when binocular fusion occurs. Two process of stereopsis are used and these are local and global stereopsis. Local stereopsis exists to evaluate the two horizontally disparate stimuli. This process is sufficient for contour stereotests. Global stereopsis is required in random-dot stereogram when the evaluation and correlation of corresponding points and disparate points are needed over a large retinal area.
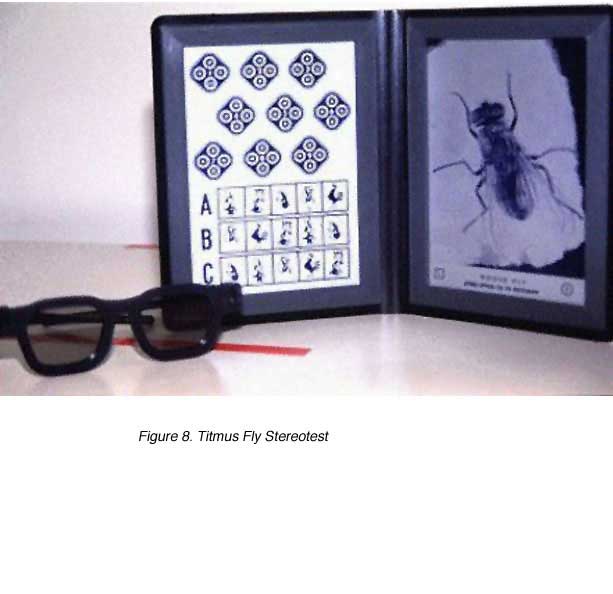
An example of a contour stereotest used in the clinic is the Titmus Fly Stereotest. In the Titmus Fly Stereotest, horizontal disparity is presented via the vectographic technique (Fricke and Siderov, 1997). When tested a 40 cm the fly has a disparity of 3,600 sec of arc; the disparity of the animals range from 400 – 100 sec of arc and the disparity of the Wirt rings range from 800 – 40 sec of arc (figure 8).
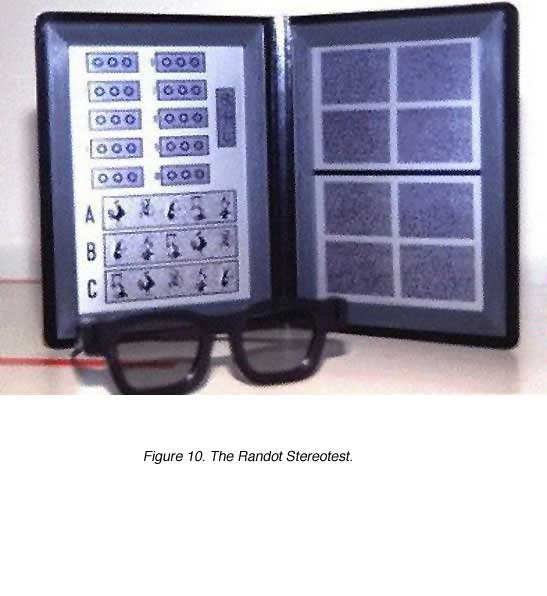
 Examples of random-dot stereotests used in the clinic are the Frisby Stereotest, the Randot Stereotest, the Random-dot E Stereotest and the Lang Stereotest. The Frisby Stereotest (figure 9) uses real depth to determine stereoacuity. Three perspex of different thicknesses are used. Four squares of geometric shapes are painted on one side of the perspex. In one of the squares, a circle of these geometric shape is painted on the other side of the perspex. Both the Randot (figure 10) and the Random-dot E uses crossed polarised filters. Disparity is also constructed vectographically. The Randot Stereotest uses modified animals and ring designs with random dot backgrounds to eliminate monocular cues. The Lang Stereotest uses a panographic technique (Fricke and Siderov, 1997) to present disparity, therefore, no filters are required. Patients are required to identify pictures on the Lang Stereotest. The Lang II Stereotest has a monocularly visible shape on it (figure 11).
Examples of random-dot stereotests used in the clinic are the Frisby Stereotest, the Randot Stereotest, the Random-dot E Stereotest and the Lang Stereotest. The Frisby Stereotest (figure 9) uses real depth to determine stereoacuity. Three perspex of different thicknesses are used. Four squares of geometric shapes are painted on one side of the perspex. In one of the squares, a circle of these geometric shape is painted on the other side of the perspex. Both the Randot (figure 10) and the Random-dot E uses crossed polarised filters. Disparity is also constructed vectographically. The Randot Stereotest uses modified animals and ring designs with random dot backgrounds to eliminate monocular cues. The Lang Stereotest uses a panographic technique (Fricke and Siderov, 1997) to present disparity, therefore, no filters are required. Patients are required to identify pictures on the Lang Stereotest. The Lang II Stereotest has a monocularly visible shape on it (figure 11).
 |  |
{kind=link}
 All the tests provides a measure of stereoacuity by asking the patient to identify the correct target that has stereoscoptic depth (target with disparity). The working distance and interpupillary distance will need to be taken into consideration when calculating stereoacuity. Patients with disturbed binocular vision or different refractive error in one eye, will perform poorly on depth discrimination tests.
All the tests provides a measure of stereoacuity by asking the patient to identify the correct target that has stereoscoptic depth (target with disparity). The working distance and interpupillary distance will need to be taken into consideration when calculating stereoacuity. Patients with disturbed binocular vision or different refractive error in one eye, will perform poorly on depth discrimination tests.
Acknowlegements
We like to thank Tim Fricke for providing Figures 8-11.
References.
- Fricke TR and Siderov J (1997) Stereopsis, stereotest and their relation to vision screening and clinical practice. Clin Exp Optom. 80: 165-172.
- Julesz B. Binocular depth perception of computer generated patterns. Bell Syst Tech J. 1960;39:1125–1162.2.
- Moses RA and Hart WM (1987) Adler’s Physiology of the eye, Clinical Application, 8th ed. St. Louis: The C. V. Mosby Company.
- Ogle KN (1950) Researches in Binocular Vision. London: Saunders. 1950
- Schwartz SH (1999)Visual Perception, 2nd ed. Connecticut: Appleton and Lange.
The autor

Michael Kalloniatis was born in Athens Greece in 1958. He received his optometry degree and Master’s degree from the University of Melbourne. His PhD was awarded from the University of Houston, College of Optometry, for studies investigating colour vision processing in the monkey visual system. Post-doctoral training continued at the University of Texas in Houston with Dr Robert Marc. It was during this period that he developed a keen interest in retinal neurochemistry, but he also maintains an active research laboratory in visual psychophysics focussing on colour vision and visual adaptation. He was a faculty member of the Department of Optometry and Vision Sciences at the University of Melbourne for some years, moved to New Zealandas the Robert G. Leitl Professor of Optometry, Department of Optometry and Vision Science, University of Auckland. Since 2008 Mike has returned to Syney, Australia as a Faculty member at the University of New South Wale, and is now Director, Centre for Eye Health, an initiative of Guide Dogs NSW/ACT and the University of New South Wales (UNSW). E-mail to m.kalloniatis@unsw.edu.au
